Autonomer Trainingsroboter für Akut- und Rehakliniken

Darüber hinaus erforscht und entwickelt TEDIRO neue Anwendungen für seinen Therapieroboter, darunter das Training von Patienten an einer Treppe und das Training der Gewichtsentlastung der operierten Gliedmaßen im Rahmen des Gangtrainings an Unterarmstützen.
Weiterhin werden bspw. verschiedene Navigationsverfahren untersucht, die Einbindung des Roboters in die Krankenhaus-IT sowie Notrufeinrichtungen und die Ansteuerung des Roboters über die Cloud.
Als erste Anwendung entwickelt TEDIRO ein mobiles Roboter-System für das Gangtraining an Unterarmstützen zum Einsatz in Akut- und Rehakliniken.
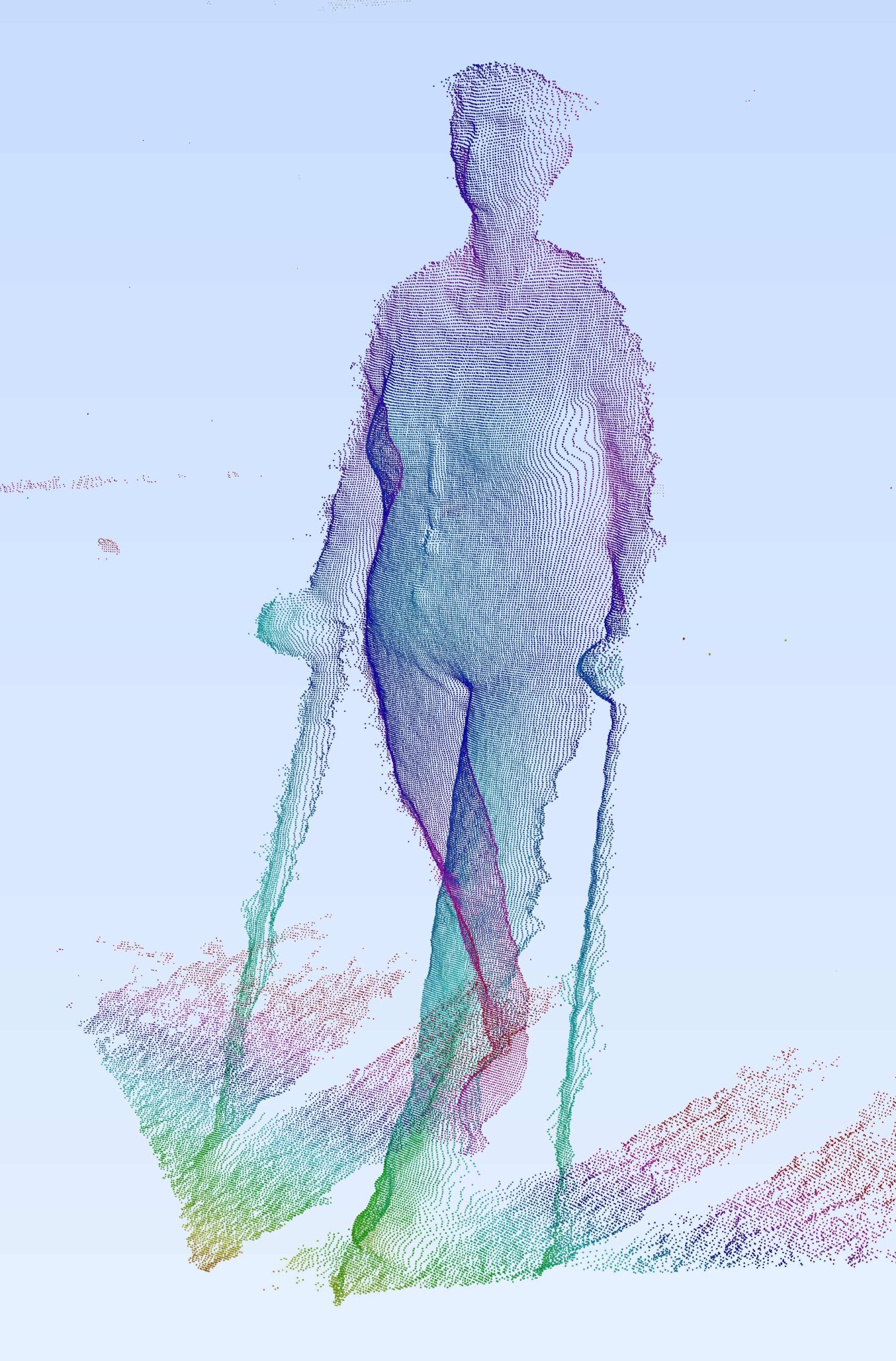
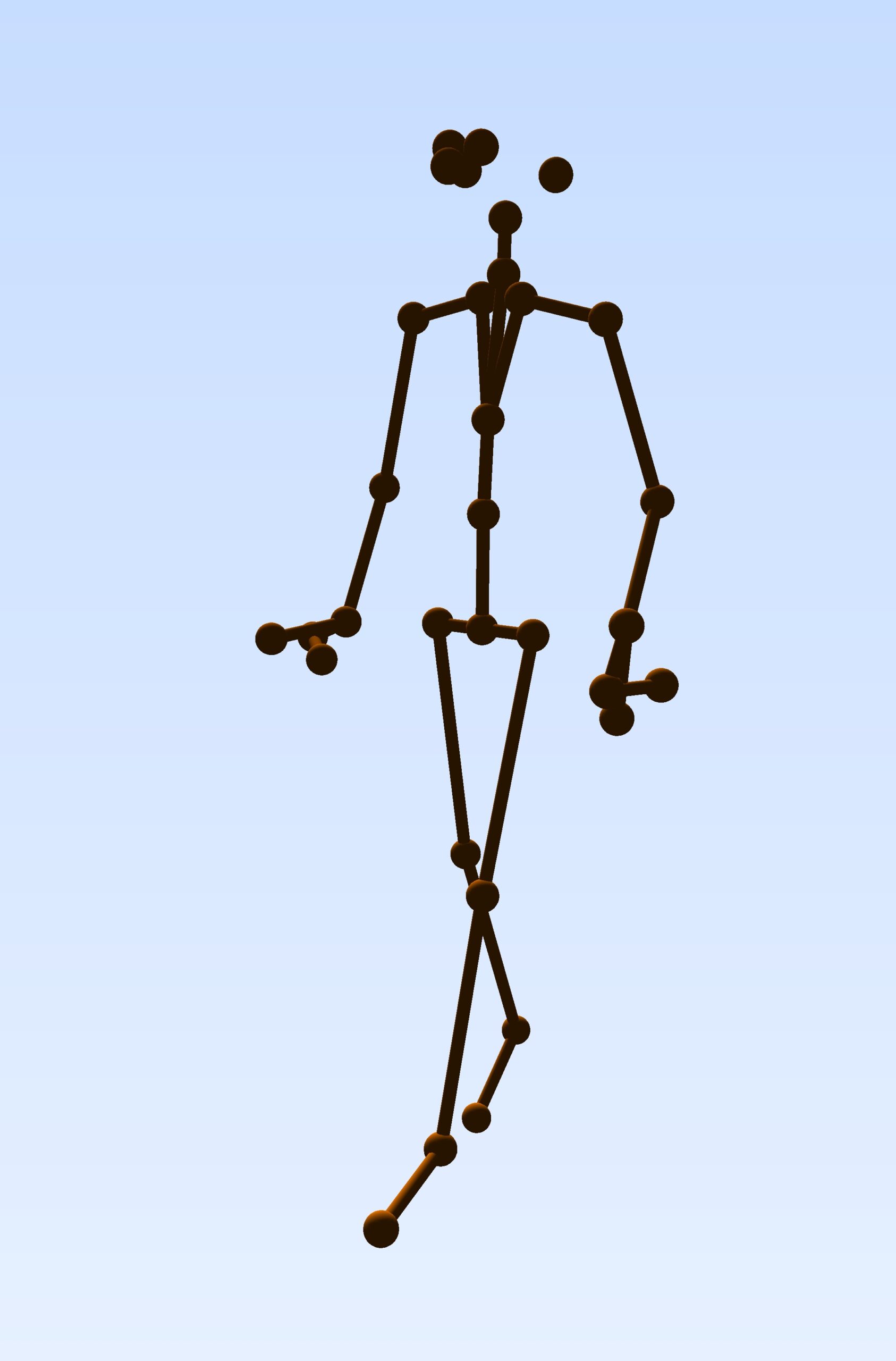
Der Roboter THERY basiert auf einer mobilen Roboterplattform, die ursprünglich für die Industrie entwickelt wurde. Diese Plattform umfasst die Antriebseinheit und ist mit einem robusten Roboter-Navigations- und Sicherheits-Stack ausgestattet. Bei TEDIRO wird diese diese Plattform mit Tiefenkameras vervollständigt, die unternehmenseigene Software implementiert und das Gehäuse montiert. Ein Gesicht und Korrekturempfehlungen auf dem Bildschirm und die Sprachausgabe unterstützen die Roboter-Patienten-Interaktion während des Trainings.